




中国初のロボットマルチモーダルモデル及び双腕協調システムが発表
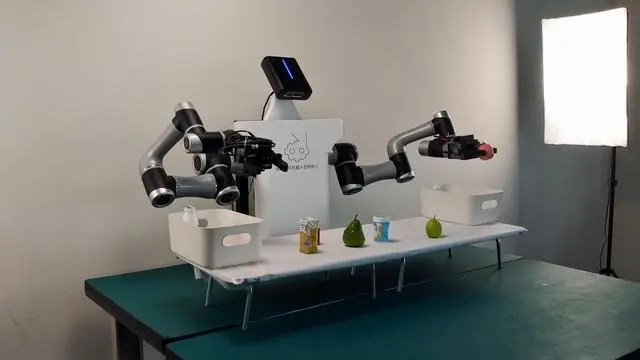
成都人型ロボットイノベーションセンターが12日、四川省成都市で中国初のロボットマルチモーダルモデル及び双腕協調システムを発表した。同モデルによりロボットは抽象的で意味論的な指示を理解・推理するとともに、双腕協調システムによってタスクを実行できる。科技日報が伝えた。
マルチモーダルデータ共同推理とは、2種類以上の認知ソースを融合し、総合的な推理を行う上、複雑なタスクを完了するプロセスを指す。同センターの研究者はマルチモーダルを人型ロボット分野に応用し、ロボットが画像、意味、力覚、環境知覚など複数種類の要素を融合させ、総合的な判断により、タスクを生成・実行させる。これは人型ロボットが独自の思考能力を持つための重要中核技術だ。
同センターの張睿睿会長は、「意味論的な指示には飲料と非飲料の相対的に明確な区分と選別、そして円柱状と長方形の物体、食用と非食用の相対的に抽象的な区分と選別が含まれる。上記のタスクを完了するためには、ロボットがマルチモーダルモデルにより自らすべてのアイテムを抽出し、一般化する必要がある。特に複数の瓶の形をしたアイテムについて、ロボットはさらにそのボトルパッケージの文字や画像などの要素から、化粧品などの非食用ボトルではなく、食用アイテムであることを総合的に判断して初めてタスクを完了することができる」と説明した。
張氏は、「マルチモーダルモデルの発表は『AIの身体化』プロセスを加速させ、人型ロボットを『プリセットポーズ』や『遠隔操作』からより強力なブレーンと自律的な実行能力を持つように進化させる。当センターは今後引き続き技術の研究開発を深め、マルチモーダルモデルと双腕協調システムの統合と適用を持続的に最適化し、人型ロボットの複雑な環境における知覚、意思決定、実行能力を向上させる」と述べた。(編集YF)
「人民網日本語版」2024年8月15日
注目フォトニュース



関連記事
掲載された記事、写真の無断転載を禁じます。
Tel:日本(03)3449-8257 Mail:japan@people.cn
