




中国初の宇宙採掘ロボットが登場
地球の資源が枯渇していく中、人類の関心は徐々に宇宙へと向かい、とりわけ鉱物資源を豊富に埋蔵する月、火星、地球近傍小惑星などに移っている。宇宙で鉱物を採掘するなど、これまではSF小説や映画の中のワンシーンに過ぎなかったが、今やだんだん現実のものになろうとしている。少し前には、中国初の宇宙採掘ロボットが中国鉱業大学で誕生した。中央テレビニュースが伝えた。
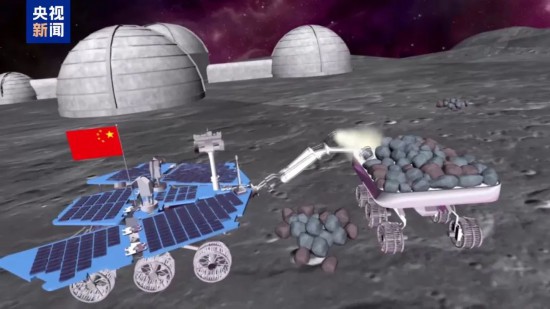
同大機電工程学院の劉新華教授のチームが開発したこの多機能宇宙採掘ロボットは、目下、大人気の人型ロボットやロボット犬などとは異なり、6足モデルを基本形とするもので、3つの車輪と3つのかぎ爪が付いている。劉氏によると、このような設計になったのは、主に宇宙の無重力の環境に適応するためだという。
劉氏は、「このかぎ爪は配列式かぎ爪フックで、微小重力環境の中でより高い付着能力を発揮し、より力強く地面をつかむことができる。微小重力環境下でサンプル採取のためにロボットを固定することもできるし、地形に沿って移動することもできる」と説明した。
このロボットは宇宙の微小重力環境に適応できるだけでなく、「バイオニクス6足移動構造を採用」して、足部分の末端に車輪と固定アンカー構造が配備されており、小惑星の凹凸のある地面を走行することもできる。
宇宙採掘ロボットが宇宙の惑星で鉱物探査・採掘作業を行おうとする時、微小重力の問題に直面するだけでなく、極端な温度変化、真空環境、宇宙放射線、重量・体積の制約など一連の難問にも向き合わなければならない。問題に対処するため、ロボットにあらゆるスキルを習得させるためにはどうしたらいいか。劉氏のチームはロボットのために特殊な「訓練場」を構築した。
同学院の華徳正准教授は、「私たちはこの訓練場の環境を構築する時に主に2つのことを考えた。1つは砂地がメインの地表を持つ地球近傍小惑星の風化レベルをシミュレーションすることだ。もう1つは微小重力環境であり、私たちが設計したこの吊り下げ機構は、垂直に吊り下げることで重力を打ち消し、微小重力状態をシミュレーションしている」と述べた。
チームのメンバーによると、砂地での訓練を繰り返した末、今や6足差動システムサスペンションやクラッチ機構などの協調作業を通じて、宇宙採掘ロボットは作業環境に基づいて自らの構造や形状を調整し、地球外惑星の複雑な地表環境に適応できるようになったという。
より多くの探査技術を確立するため、宇宙採掘ロボットは同大深地工学スマート建造・健康運営メンテナンス全国重点実験室で「レベルアップした訓練」を受けることも求められている。同実験室は月面の極限環境を正確にシミュレーションできるものだ。
同実験室の李瑞林准教授によると、この訓練設備は主に月の現地環境を再現することを目的としている。月面重力は地球の6分の1であり、超高真空環境下にある。月の昼間は最高130℃に達し、夜間には-180℃まで冷え込み、極地では-250℃にもなる。こうした環境を忠実に再現した後、さらに月の土壌と似た性質のシミュレーション用月の土壌を採用し、月の地層の特徴を高精度かつ忠実に再現した。実際、これは月とほぼ一致した状態になっている。そこで再び実験を行ったところ、得られたデータは実際に月の上で得られたデータに近いものになったという。(編集KS)
「人民網日本語版」2025年3月18日
注目フォトニュース




関連記事
掲載された記事、写真の無断転載を禁じます。
Tel:日本(03)3449-8257 Mail:japan@people.cn
