中国有人宇宙事業弁公室の情報によると、有人宇宙船「神舟14号」の乗組員の陳冬飛行士と劉洋飛行士、蔡旭哲飛行士は緊密に連携し、北京時間17日午後4時50分に約5時間半にわたる船外活動のすべての予定任務を無事に完了した。陳飛行士と蔡飛行士はすでに安全に宇宙ステーション「問天」実験モジュールに戻っており、船外活動を無事成功させた。科技日報が伝えた。
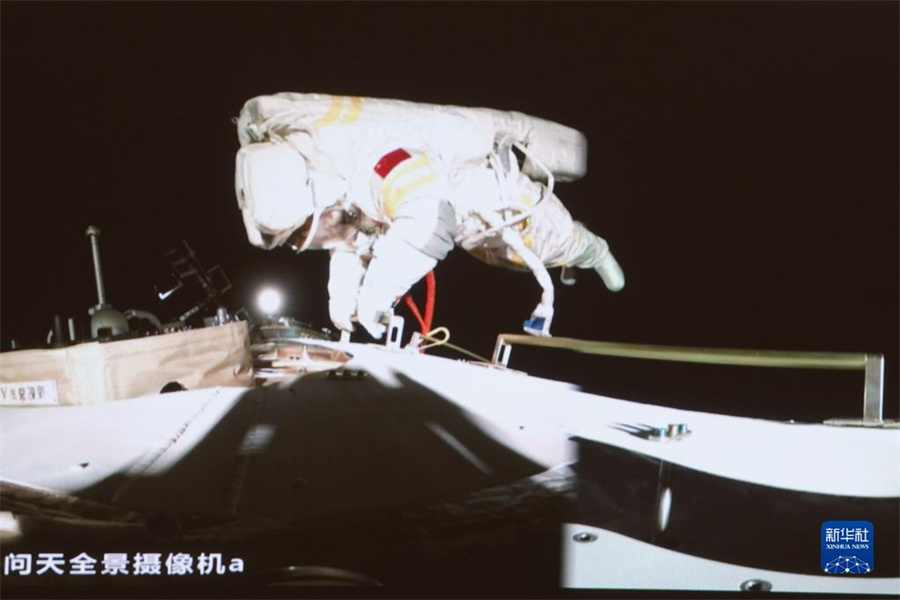
宇宙飛行士は船外活動中、まず「天和」コアモジュールと「問天」実験モジュールの間の連結装置、「天和」と「夢天」実験モジュールの間の連結装置の設置を完了し、3モジュール間の船外を移動のための「天橋(歩道橋)」を架けた。蔡飛行士はこの「天橋」を使って、初のモジュール間船外移動を実現した。さらに「問天」フルパノラマカメラAの持ち上げ、小型ロボットアーム助力取っ手の設置などの任務を完了した。その全過程は無事順調に完了した。これは宇宙ステーション「T字」基本構造の組立完了後における初の船外活動となり、宇宙飛行士とロボットアームの共同作業能力を初めて検証し、「問天」のエアロック及び船外活動サポート設備の機能・性能の更なる検証が行われた。
宇宙ステーションの「天橋」構築は、今回の船外活動の最大の見所だった。中国航天科技集団第五研究院総合設計部宇宙ステーションシステム総合副チーフデザイナーの李学東氏によると、宇宙ステーションの「T字」基本構造の軌道上での組立後、宇宙飛行士の船外活動範囲は単一モジュールから3モジュールに拡大した。宇宙飛行士のモジュール間の移動を便利にするため、今回の任務では「問天」と「天和」、「夢天」と「天和」の間にモジュール間連結装置を設置した。この装置はその用途から「天橋」と呼ばれている。
「天橋」の一端は実験モジュール連結装置の基礎とつながり、別の一端は「天和」の丸形取っ手とつながっている。設置完了後、宇宙飛行士は実験モジュールから「天和」に移動する際に、ロボットアームで臨時の橋を架ける必要がなくなる。また宇宙飛行士は「問天」のフルパノラマカメラのロックを解除し、カメラを上に約210ミリメートル持ち上げた。これにより3モジュール全体の船外環境を俯瞰できるようにし、視野をより広げた。(編集YF)
「人民網日本語版」2022年11月18日