
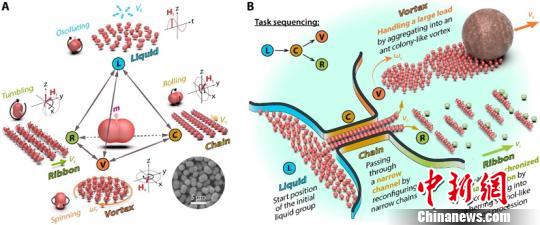
微遊動ロボットの群れのマルチモード転化(左)、環境への反応と群れの動き(右)
ハルビン工業大学が25日に発表した情報によると、同校の機電学院ロボット技術・システム国家重点実験室の謝暉教授が率いるチームは、がん診療用の磁性微遊動ロボットを開発した。その成果は、がん治療における標的への効率的な施薬と早期診断体内イメージングに効果的なソリューションを提供する見込みとなっている。中国新聞網が伝えた。
自然界にはさまざまな生物自己組織化システムが存在しており、高度な集団的知恵を示すことで、個体では解消できない複雑な問題を解消する。例えば分業し協力するアリの群れは複雑かつ精巧な巣を作り、非常に重い獲物を運ぶことができる。陣形を組み捕食するニシンの群れは非常に警戒心の強いカイアシ類を容易に捕まえることができる。
これらのことをヒントに、謝氏のチームは磁性微遊動ロボットを開発した。この落花生型のロボットの全長は3ミクロン、直径は2ミクロンで、髪の毛の直径の約40分の1のみだ。
このロボットはおびただしい数のチームを作り共同作業を行う。ロボット間で非常に小さな作用力のコミュニケーションを行うことで、マルチモードを持つ群れを形成する。これはアリの群れが触覚や匂いでコミュニケーションするのと同じだ。
ロボットが十分に小さいことから、毛細血管の末端や網膜など、その他の手段では直接治療できない部位まで到達できる。将来的には体内運動ナビゲーションを通じ、薬を搭載した数多くの微遊動ロボットが群れを作り、病源に直接到達することができる。病変細胞を識別・攻撃し、効率的かつ副作用のない治療を実現する。
同ロボットはさらに体内に留まり、健康状態のモニタリングを行い、人体の免疫系に協力し人の健康を長期的かつ効果的に維持する。疾患の早期診断と治療に新たな手段を提供する。
この成果は「サイエンス」誌の姉妹ジャーナル「Science Robotics」に掲載された。(編集YF)
「人民網日本語版」2019年3月26日
 上海国際女子ハーフマラソン大会が開催 街が華やかな雰囲…
上海国際女子ハーフマラソン大会が開催 街が華やかな雰囲…
 上海初の無人垂直循環式立体駐車場が登場 20台駐車可能
上海初の無人垂直循環式立体駐車場が登場 20台駐車可能
 西安の古城壁に「車いす用階段昇降機」で高齢者もらくらく…
西安の古城壁に「車いす用階段昇降機」で高齢者もらくらく…
 東京オリンピックの聖火リレーで使用されるトーチ発表
東京オリンピックの聖火リレーで使用されるトーチ発表
 北京市郊外鉄道S2線の車窓から眺める満開のヤマモモ
北京市郊外鉄道S2線の車窓から眺める満開のヤマモモ
 薄毛は世界共通の悩み?中国製ウィッグが海外で人気に
薄毛は世界共通の悩み?中国製ウィッグが海外で人気に
 KAWSの巨大フィギュア作品がビクトリア・ハーバーに浮かぶ
KAWSの巨大フィギュア作品がビクトリア・ハーバーに浮かぶ 武漢市の大学で360度パノラマ写真作品展
武漢市の大学で360度パノラマ写真作品展 2019日中友好大学生訪中団が訪中 理解と友情を深める
2019日中友好大学生訪中団が訪中 理解と友情を深める 日本建築家・妹島和世 中国初作品の主体工事完成
日本建築家・妹島和世 中国初作品の主体工事完成





