新バージョンはバイオニクス設計を用いたより滑らかな脚部、より力強い関節駆動能力を持ち、独特な閉ループ制御最適化アルゴリズム及び正確な状態フィードバックと連係することで、ジャンプする前に理想的な体の姿勢を維持できる。軽量化された足の設計により、「絶影」は完全に宙に浮いた時でも足を激しく動かした反動の影響を受けず、理想的な姿勢を維持することができると同時に、着地の際に強い不規則的な衝撃の影響を受けず、速やかにバランスを取り戻し、転倒を防止する。
このようにして、新バージョンは四足歩行動物のジャンプの動作を模倣することに成功した。前方向への跳躍距離は1.5メートルで、高さ約40センチの障害物を飛び越えることができる。垂直方向の跳躍の高さは70センチで、屋外の障害物のある環境に適応できる。
自主充電の際の測位には視覚情報フィードバックが採用されている。視覚システムの補助を受け、ロボットを充電エリアに誘導し、低速でゆっくり移動させる。ロボットが指定エリアに入ると、視覚による正確な測位情報に基づき、ロボットの体を充電装置と完全に接続させる。自主充電装置自体に、独自のワイヤレス通信、低電圧検査測定、状態確認、充電失敗後の再充電などの機能が備わっている。
研究チームによると、新型「絶影」は日常的な生産活動の場で効果を発揮する。特に環境が複雑な鉱山、鉄道のトンネルなどのシーンでは、搭載されたカメラや各種検査測定用のセンサーを使い、簡単に巡回点検を行うことが可能で、四足歩行ロボットのメリットを十分に発揮できる。(編集YF)
「人民網日本語版」2019年11月20日
 ネットで話題の「積み木ビル」 江蘇省昆山市
ネットで話題の「積み木ビル」 江蘇省昆山市
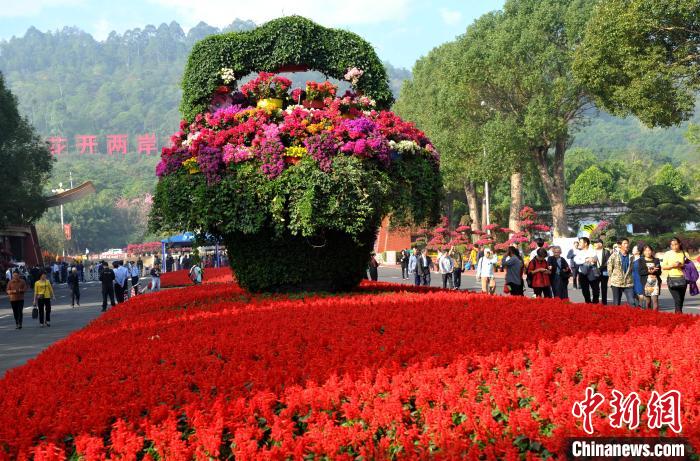 海峡両岸の第11回農業博・第21回花博が開幕 福建省漳州市
海峡両岸の第11回農業博・第21回花博が開幕 福建省漳州市
 冬の米ヒューストンを明るく照らすランタン
冬の米ヒューストンを明るく照らすランタン
 呉亦凡とMVで共演したKoki, 、普段は「クリス」呼び
呉亦凡とMVで共演したKoki, 、普段は「クリス」呼び
 世界の漢服愛好家が武漢・黄鶴楼に集合 湖北省
世界の漢服愛好家が武漢・黄鶴楼に集合 湖北省
 美しさに酔いしれる曽家山の秋 四川省広元市
美しさに酔いしれる曽家山の秋 四川省広元市