人民網モバイルニュース配信
人民網モバイルニュース配信 メールマガジン登録
メールマガジン登録 I-mode登録
I-mode登録










北京宇宙飛行制御センターが23日に明らかにしたところによると、月面ローバー「玉兎号」は同日午前5時、同センターと探査機システムの精密な共同コントロールの下、ロボットアームを広げた。これはロボットアームの月面使用試験が順調に完了したことを意味する。科技日報が伝えた。
同センター総体室の呉風雷・副室長は、「ロボットアームの使用試験は、使用と回収の二つのステップに分かれる。人の腕を曲げるように、試験ではロボットアームの腕と肩の関節の正方向・反対方向への運動を実現しなければならない。一般的な人であれば、この動作は数秒間で完成できるが、地球上から38万キロ離れた玉兎号の場合は、難度が非常に高くなる。今回の試験には、数十分間かかった」と説明した。
同センターのチーフエンジニアの周建亮氏は、「ロボットアームの試験は、玉兎号の月面試験段階における、重要な内容の一つだ。現時点でこの試験を実施したのは、月面上の一回目の夜が訪れる前に、玉兎号を最良の状態に調整することで、夜を過ぎてから多くの科学調査任務を効果的に遂行するためだ」と語った。
科学調査任務の他に、玉兎号は月の昼と夜の極端な環境の試練に耐えなければならない。月の昼は、月面が太陽光を激しく照射される時間帯で、気温が摂氏100度以上に達する。月の夜はこれとは真逆で、太陽光がまったく届かなくなり、気温がマイナス180度以下になる。今回の月の夜は今月26日頃に訪れ、約半月間続く。夜になると玉兎号はスリープ状態になり、エネルギーの補給を受けられないまま次の朝を待つこととなる。(編集YF)
「人民網日本語版」2013年12月24日
このウェブサイトの著作権は人民日報社にあります。
掲載された記事、写真の無断転載を禁じます。
Tel:日本(03)3449-8257、080-5077-8156 北京 (010) 6536-8386

 Apple
Apple 新浪
新浪 騰訊
騰訊 人民
人民 微信
微信 RSS
RSS 霍啓剛と郭晶晶の第一子 中曦ちゃんが話題に
霍啓剛と郭晶晶の第一子 中曦ちゃんが話題に 「グランド・マスター」がアカデミー賞外国語映画賞の候補に
「グランド・マスター」がアカデミー賞外国語映画賞の候補に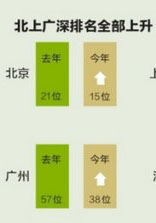 中国内陸部の都市、生活費ランキングで上位に浮上
中国内陸部の都市、生活費ランキングで上位に浮上 日本のカメラマンが撮影した可愛いハリネズミ
日本のカメラマンが撮影した可愛いハリネズミ 新疆・アルタイ 雪の後の樹氷の風景
新疆・アルタイ 雪の後の樹氷の風景 貴州の小学生が屋上農園を体験
貴州の小学生が屋上農園を体験 クライミングに挑戦する登山者
クライミングに挑戦する登山者 ノーベル賞受賞者「中国の煙霧は60年代の英国よりまし」
ノーベル賞受賞者「中国の煙霧は60年代の英国よりまし」 女性が地下鉄での痴漢防止用ベストを開発 一面にトゲ
女性が地下鉄での痴漢防止用ベストを開発 一面にトゲ 北京 女性と接触事故の外国人男性が本国送還へ
北京 女性と接触事故の外国人男性が本国送還へ 南寧モーターショー
南寧モーターショー